
Single collided waveform LIDAR return signal
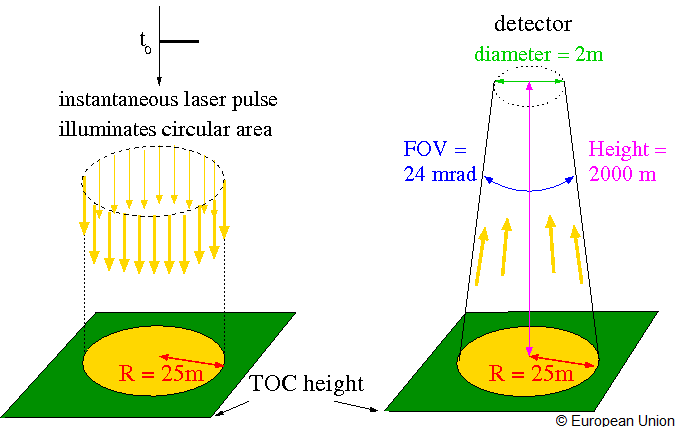
This measurement involves the simulation of the return signal of a waveform LIDAR accounting only for the first order of scattering of radiation within the canopy.
| Header line content | Header line format |
|---|---|
| # rows | %4d |
| # columns in file | %4d |
| heigth level interval | %.6f |
| Content | Format |
|---|---|
| mean height level of bin [m] | %.6f |
| return signal [-] | %.10f |
| standard deviation of return signal* | %.10f |
*: if not available set to −1.0000000000.
The order in which the return signal from different height bins are listed in the measurement files is from the bottom of the canopy ($z_{min}$) towards the top of the canopy ($z_{max}$) height levels, as outlined below:
20 3 0.050000
0.025000 0.0000001427 -1.0000000000
0.075000 0.0000000001 -1.0000000000
0.125000 0.0000000001 -1.0000000000
0.175000 0.0000000002 -1.0000000000
0.225000 0.0000000003 -1.0000000000
0.275000 0.0000000008 -1.0000000000
0.325000 0.0000000011 -1.0000000000
0.375000 0.0000000014 -1.0000000000
0.425000 0.0000000016 -1.0000000000
0.475000 0.0000000019 -1.0000000000
0.525000 0.0000000025 -1.0000000000
0.575000 0.0000000028 -1.0000000000
0.625000 0.0000000037 -1.0000000000
0.675000 0.0000000041 -1.0000000000
0.725000 0.0000000022 -1.0000000000
0.775000 0.0000000029 -1.0000000000
0.825000 0.0000000018 -1.0000000000
0.875000 0.0000000021 -1.0000000000
0.925000 0.0000000012 -1.0000000000
0.975000 0.0000000002 -1.0000000000